This course covered many topics in depth, including exact methods, sampling-based methods, and heuristic search
In-Depth Exposure to Motion Planning
This is by far one of my favourite courses taken during my undergraduate degree. The course material provided a good mix between theory and practice, and many different kinds of algorithms were explored in detail. Below are the projects from the course:
Projects
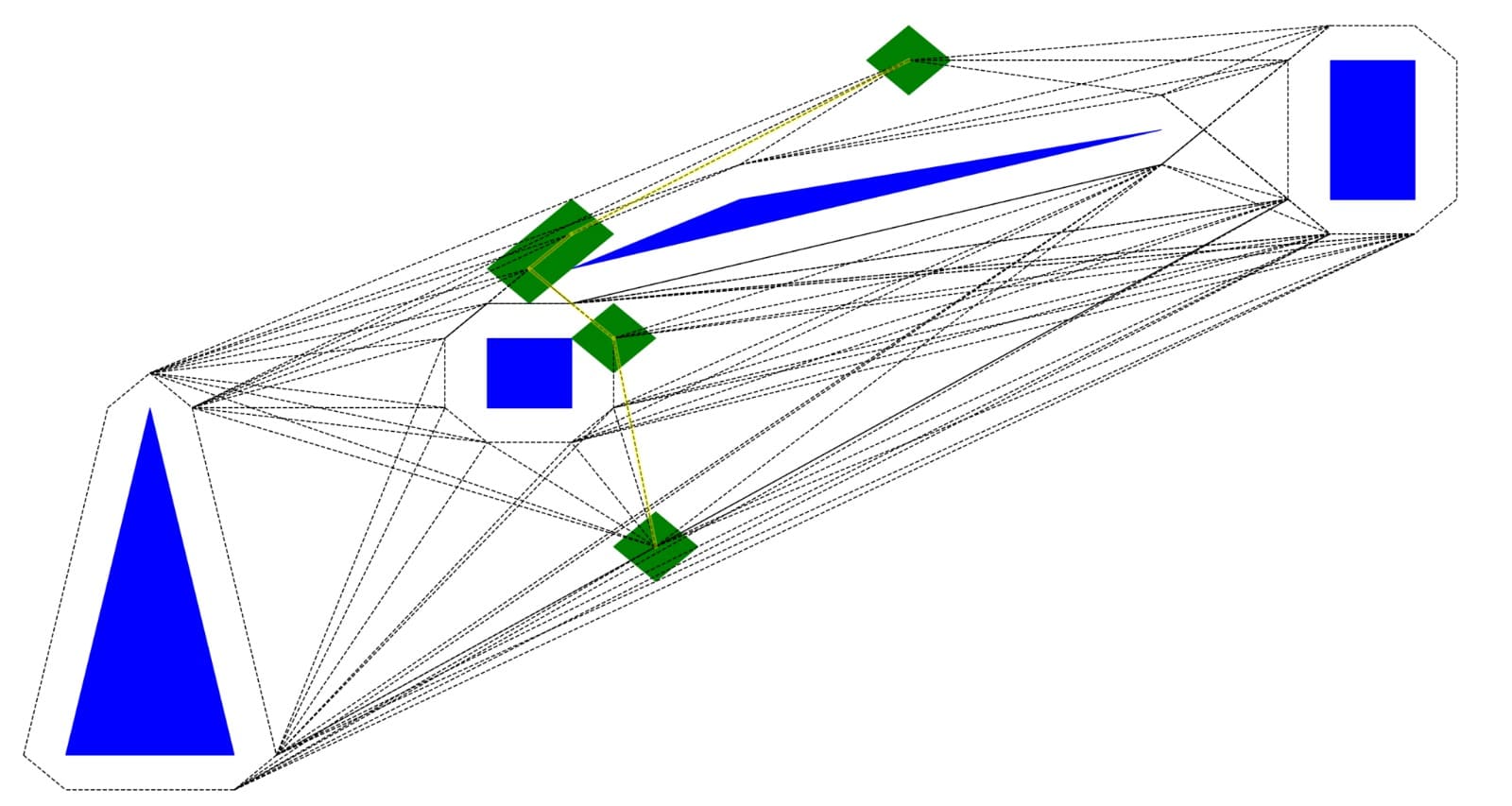
Minkowsky Sums & Visibility Graphs
Visibility graphs are a graph representation of shapes in a plane, where each point is connected to visible points. Paired with Minkowski Sums, they can be used to plan a path for a robot Anayzing the algorithms reveal that visibility graphs used in motion planning are limited to convex shapes in low dimensions.
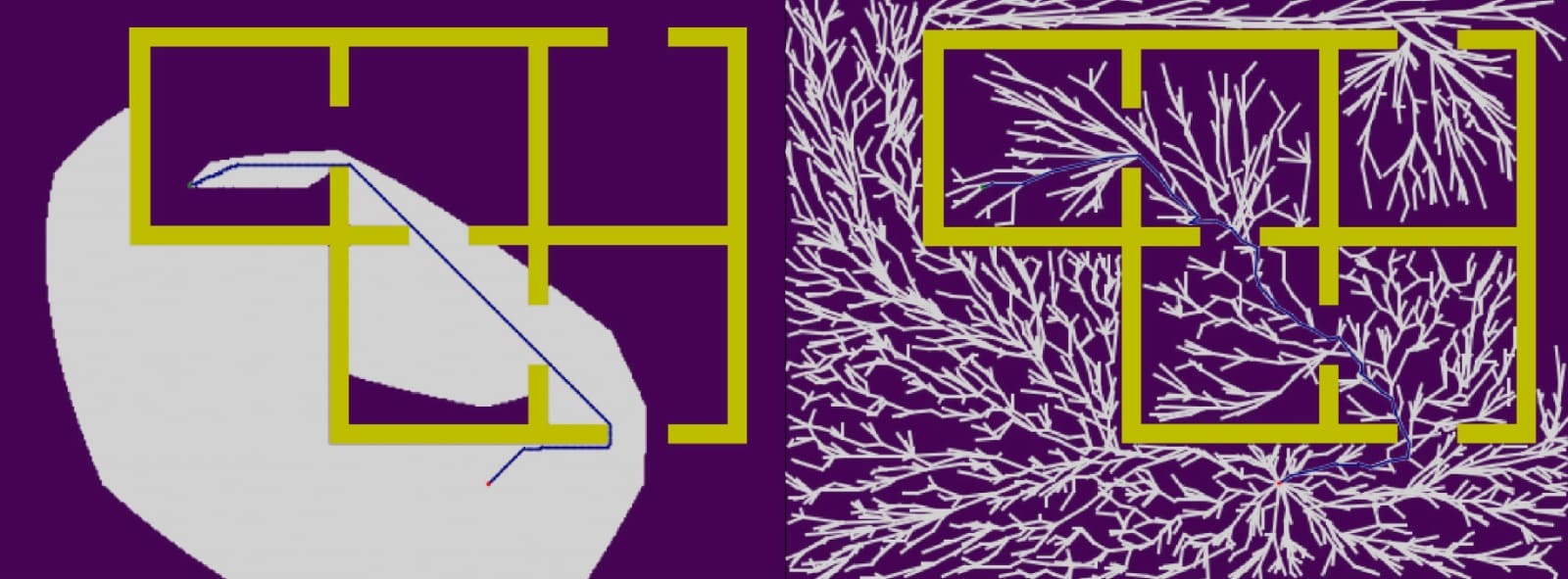
Weighted A*, RRT, RRT*
A* is a best-first search algorithm that combines the benefits of both breadth-first search and uniform-cost search. Sampling-based methods, such as RRT and RRT*, generate random samples and build a tree to connect the start and goal. A* is efficient with good heuristics but sampling-based methods are more robust and flexible in complex high-dimensional environments.
Data analysis on multiple runs allows us to understand how different hyper-parameters affect the runtime of the algorithms, as well as the quality of solution
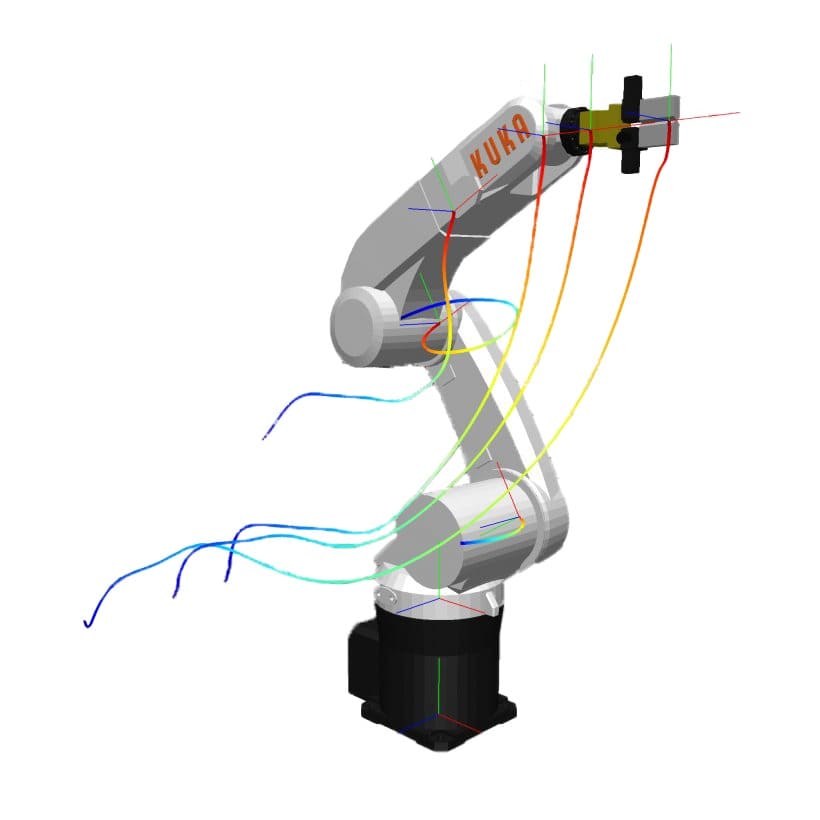
Manipulation & Inspection planning
Coming Soon
Final Project: Task Inspection Planning
Coming Soon
Skills Used/Learned
- In-depth algorithm design and implementation
- Time complexity analysis of algorithms
- Use of Python and Object Oriented Programming
- Knowledge in Data Structures